Risto kirjoitti: Minkähänlaisia tekijäoikeuksia tuohon pidät, josko askartelisin samanlaisen? Tai oikeastaan selkeämmin: millähän hintaa moisen tekisit?
En pidä mitään tekijänoikeuksia tuohon. Ja vähän niinkuin open source softa tyyliin; laitetaan jakoon sellaisena kun on, toimii tai sitten ei 
Jos on tarvetta niin minulta saa kyllä sähköpiirrustukset ja softat (sorsat tai binäärin tai valmiiksi lutikalle poltettuna). Ja neuvoja, tai ainakin kommentteja omista kokemuksista tuota puuhatessa. Tuon juottelu on suhteellisen suoraviivaista, vaikka se hieman sekavalta näyttääkin. Alkaa kyllä maistua puulta jossain vaiheessa. Ota vaan kolvi käteen, et halua minun sitä tekevän (myyrän näkö ja peukalo keskellä kämmentä). Hall-anturi on kiinni läpän akselissa rattailla jotka löysin entisen printterin sisuksista. Noin muuten taisi keskeisimmät viritykset näkyä kuvista.
En ole elektroniikka expertti, joten jollakulla sitä puolta ymmärtävällä voi olla jotain sanottavaa ratkaisun järkevyydestä.
Elektroniikkakomponentit ei ole kovin kalliita. Taisi hall anturi olla hieman alle 20 Eur ja LCD samaa luokkaa. Muut kilkkeet sitten euroja tai muutamia. Lähinnä ajan takaa että suhteellisen halpa kokeilu, jos ei laske tunteja. Tuossa käytetään samaa MCU:ta mikä on Arduino Unossa.
Komponentit (poislukien vastukset ja konkat) oli noi:
ATMEL ATMEGA328P-PU MCU, 8BIT, ATMEGA, 20MHZ, DIP-28
http://fi.farnell.com/atmel/atmega328p- ... dp/1715487
TEXAS INSTRUMENTS LM258P Operational Amplifier, Dual, 700 kHz, 2 Amplifier, 0.3 V/µs, 3V to 32V, ± 1.5V to ± 16V, DIP
http://fi.farnell.com/texas-instruments ... dp/2323283
BI TECHNOLOGIES / TT ELECTRONICS 6127V1A180L.5 SENSOR, HALL, 0.2V, +20V TO -10V, 180DEG
http://fi.farnell.com/bi-technologies-t ... dp/2319661
MICROCHIP MCP4822-E/P Digital to Analogue Converter, Dual, AEC-Q100, 12 bit, Serial, 2.7V to 5.5V, DIP, 8 Pins
http://fi.farnell.com/microchip/mcp4822 ... dp/1439413
TEXAS INSTRUMENTS LM2574N-5.0/NOPB Buck (Step Down) Switching Regulator, Fixed, 4V-40V In, 5V And 0.5A Out, DIP-8
http://fi.farnell.com/texas-instruments ... dp/1469169
MULTICOMP MCSCH895-331KU INDUCTOR, 330µH, 10%, RADIAL LEADED
http://fi.farnell.com/multicomp/mcsch89 ... dp/1864386
MULTICOMP 1N5817 Schottky Rectifier, Single, 20 V, 1 A, DO-41, 2 Pins, 450 mV
http://fi.farnell.com/multicomp/1n5817/ ... dp/7429282
MIDAS MC21605C6W-BNMLWS Alphanumeric LCD, 16 x 2, White on Blue, 5V, SPI, English, Japanese, Transmissive
http://fi.farnell.com/midas/mc21605c6w- ... dp/2425692
Alla maistiaiset (keskeiset osat) koodista. Ja jossain alempana huonolla resoluutiolla sähkökuva.
Koodi:
#include <SPI.h>
#include <EEPROM.h>
#include "Logging.h"
#include "CxMafSensor.h"
#include "CxMafSensorPinDef.h"
#include "PositionSensor.h"
static const double RES_TOT_18C =
RES1_OHM + RPOT_TOT_OHM +
1 / (1.0 / RES2_OHM + 1.0 / (76.0 + RTEMP_ADJUSTMENT));
static const double VREF_18C_127V = 12.7 * RPOT_TOT_OHM / RES_TOT_18C;
namespace Cx {
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
CxMafSensor::CxMafSensor()
:
m_ledOn( false ),
m_prevTime( 0 ),
m_airTempSensor(
Util::ResistanceSensor::TOP_SENSOR,
OPERATING_VOLTAGE, AIR_TEMP_FIXED_RESISTANCE
),
m_airTempConverter( 94, 11.5, 68, 21, 31, 45 ),
m_displayMode( BASIC ),
m_calibrationState( IDLE ),
m_opampOutToDacInConverter( 1.22, 400, 10.74, 3596 ),
m_minPosAdValue( MIN_POS_DEF_ADVALUE ),
m_maxPosAdValue( MAX_POS_DEF_ADVALUE ),
m_posSensorValue( 0 ),
m_xPos( 0.0 ),
m_temperatureCelcius( 0.0 ),
m_temperatureOhm( 0 ),
m_battSensorValue( 0 ),
m_batteryVoltage( 0.0 ),
m_vPos( 0.0 ),
m_vRef( 0.0 ),
m_adjustmentVoltLow( 0.0 ),
m_adjustmentVoltHigh( 0.0 ),
m_adjustmentVoltRef( 0.0 )
{
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::Setup()
{
delay( 100 );
pinMode( LED_PIN, OUTPUT);
digitalWrite( LED_PIN, LOW );
pinMode( DAC_SS_PIN, OUTPUT );
digitalWrite( DAC_SS_PIN, HIGH );
SPI.begin();
m_lcd.Init( LCD_SS_PIN, LCD_REG_SELECT_PIN );
m_dac.Init( DAC_SS_PIN );
m_displaySelectButton.Init( DISPLAY_SELECT_PIN );
m_calibrationButton.Init( CALIBRATION_PIN );
uint16_t minPos = 0;
uint16_t maxPos = 0;
EEPROM.get( 0, minPos );
EEPROM.get( sizeof( minPos ), maxPos );
if ( 0xFFFF == minPos ){ minPos = m_minPosAdValue; }
if ( 0xFFFF == maxPos ){ maxPos = m_maxPosAdValue; }
if ( m_minPosAdValue < m_maxPosAdValue ){
m_minPosAdValue = minPos;
m_maxPosAdValue = maxPos;
}
EEPROM.put( 0, m_minPosAdValue );
EEPROM.put( sizeof( m_minPosAdValue ), m_maxPosAdValue );
return;
}
/*--------------------------------------------------------------------*//**
* Called in busy loop
*//*--------------------------------------------------------------------*/
void CxMafSensor::DoThings()
{
UpdatePosition();
UpdateAirTemp();
UpdateBatteryVoltage();
CalculateOutVoltages();
UpdateAdjustments();
AdjustRefVolt();
AdjustPosVolt();
WriteDac();
CalibratePositionRange();
UpdateDisplay();
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::CalibratePositionRange()
{
if ( CALIBRATE != m_displayMode ){
m_calibrationState = IDLE;
return;
}
if ( true != m_calibrationButton.IsClicked() ){ return; }
switch( m_calibrationState ){
case IDLE :
m_calibrationState = WAITING_MIN_VALUE;
break;
case WAITING_MIN_VALUE :
// if ( m_posSensorValue < m_maxPosAdValue ){
m_minPosAdValue = m_posSensorValue;
// }
m_calibrationState = WAITING_MAX_VALUE;
break;
case WAITING_MAX_VALUE :
// if ( m_posSensorValue > m_minPosAdValue ){
m_maxPosAdValue = m_posSensorValue;
// }
m_calibrationState = IDLE;
EEPROM.put( 0, m_minPosAdValue );
EEPROM.put( sizeof( m_minPosAdValue ), m_maxPosAdValue );
break;
}
return;
}
/*--------------------------------------------------------------------*//**
* This is for development time calibration
*//*--------------------------------------------------------------------*/
void CxMafSensor::DirectPosToDac()
{
uint32_t daValue = (m_posSensorValue * 0xFFFUL) / 1023UL;
m_dac.SetValue( daValue, 0 );
m_dac.SetValue( daValue, 1 );
m_lcd.SetPosition( 0, 0 );
m_lcd.print( m_posSensorValue );
m_lcd.print( " " );
m_lcd.SetPosition( 0, 8 );
m_lcd.print( (int)daValue );
m_lcd.print( " " );
m_lcd.SetPosition( 1, 0 );
m_lcd.print( m_batteryVoltage, 1 );
m_lcd.print( "V " );
#ifdef __x86_64__
LOG_STDOUT(
"\n 0123456789ABCDEF\n" <<
"\"" << m_lcd.m_screen[ 0 ] << "\"\n" <<
"\"" << m_lcd.m_screen[ 1 ] << "\""
);
#endif
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::WriteDac()
{
uint16_t vRefDac = ConvertOpampOutToDacIn( m_vRef );
uint16_t vPosDac = ConvertOpampOutToDacIn( m_vPos );
#if (false)
LOG_STDOUT(
"\nvRef=" << m_vRef << ", vRefDac=" << vRefDac <<
"\nvPos=" << m_vPos << ", vRefDac=" << vPosDac
);
#endif
#if ( true )
m_dac.SetValue( vRefDac, 0 );
m_dac.SetValue( vPosDac, 1 );
#else
// for testing with only one DAC output
m_dac.SetValue( vRefDac, 1 );
m_dac.SetValue( vPosDac, 0 );
#endif
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
uint16_t CxMafSensor::ConvertOpampOutToDacIn( double a_volt )
{
return m_opampOutToDacInConverter.GetValue( a_volt );
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::UpdatePosition()
{
m_posSensorValue =
m_posValueSuppressor.SetValue( analogRead( POS_SENSOR_ANALOG_IN_PIN ) );
uint16_t posSensorVal = m_posSensorValue;
if ( m_minPosAdValue < m_maxPosAdValue ){
if ( posSensorVal < m_minPosAdValue ){ posSensorVal = m_minPosAdValue; }
if ( posSensorVal > m_maxPosAdValue ){ posSensorVal = m_maxPosAdValue; }
}
else{
// Inverted range; i.e. min pos value > max pos value
if ( posSensorVal > m_minPosAdValue ){ posSensorVal = m_minPosAdValue; }
if ( posSensorVal < m_maxPosAdValue ){ posSensorVal = m_maxPosAdValue; }
}
double posPercentage =
double( posSensorVal - m_minPosAdValue )
/
double( m_maxPosAdValue - m_minPosAdValue );
double subRangeBeginPercentage = 0.0;
double subRangeEndPercentage = 1.0;
double subRangeBeginXPos = 0.0;
double subRangeEndXPos = 110.0;
if ( 0.063 >= posPercentage ){
subRangeBeginPercentage = 0.0;
subRangeEndPercentage = 0.063;
subRangeBeginXPos = 0.0;
subRangeEndXPos = 10.0;
}
else if ( 0.133 >= posPercentage ){
subRangeBeginPercentage = 0.063;
subRangeEndPercentage = 0.133;
subRangeBeginXPos = 10.0;
subRangeEndXPos = 20.0;
}
else{
subRangeBeginPercentage = 0.133;
subRangeEndPercentage = 1.0;
subRangeBeginXPos = 20.0;
subRangeEndXPos = 110.0;
}
int16_t rangeLen = m_maxPosAdValue - m_minPosAdValue;
double subRangeXLen = subRangeEndXPos - subRangeBeginXPos;
int16_t subRangeBeginPos =
subRangeBeginPercentage * rangeLen + m_minPosAdValue;
int16_t subRangeEndPos =
subRangeEndPercentage * rangeLen + m_minPosAdValue;
int16_t subRangeLen = subRangeEndPos - subRangeBeginPos;
int16_t posInSubRange = posSensorVal - subRangeBeginPos;
double posSubRangePercentage = double( posInSubRange ) / subRangeLen;
m_xPos = subRangeBeginXPos + posSubRangePercentage * subRangeXLen;
#if ( false )
LOG_STDOUT(
"\nm_posSensorValue = " << m_posSensorValue <<
"\nposPercentage = " << posPercentage <<
"\nposInSubRange = " << posInSubRange <<
"\nsubRangeBeginPos = " << subRangeBeginPos <<
"\nsubRangeEndPos = " << subRangeEndPos <<
"\nsubRangeBeginXPos = " << subRangeBeginXPos <<
"\nposSubRangePercentage = " << posSubRangePercentage <<
"\nxPos = " << m_xPos
);
#endif
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::UpdateAirTemp()
{
long sensorValue =
m_tempValueSuppressor.SetValue(
analogRead( AIR_THERMISTOR_ANALOG_IN_PIN )
);
m_temperatureOhm = m_airTempSensor.GetResistance( sensorValue );
// LOG_STDOUT("m_temperatureOhm=" << m_temperatureOhm );
// LOG_STDOUT( "sensorValue=" << sensorValue );
m_temperatureCelcius = m_airTempConverter.GetValue( m_temperatureOhm );
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::UpdateAdjustments()
{
UpdateAdjustment( ADJUST_LOW_PIN, m_adjustmentVoltLow );
UpdateAdjustment( ADJUST_HIGH_PIN, m_adjustmentVoltHigh );
UpdateAdjustment( ADJUST_REF_PIN, m_adjustmentVoltRef );
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::UpdateAdjustment(
uint16_t a_pin,
double &a_adjVolt
){
int adValue = analogRead( a_pin );
if ( 12 > adValue ){ adValue = 12; } // allow it get to both ends
else if ( 1012 < adValue ){ adValue = 1012; } // i.e. 500 to both dirs
a_adjVolt =
ADJUSTMENT_MAX_VOLT *
(double( adValue ) - double( ADJUSTMENT_MID_AD_VALUE ) )
/
500.0;
#if ( false )
LOG_STDOUT(
"pin=" << a_pin << ", adValue=" << adValue << ", adjV=" << a_adjVolt
);
#endif
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::CalculateOutVoltages()
{
PositionSensor posSen;
double rPos = posSen.GetResistenceForVisualPosition( m_xPos );
double rTot =
RES1_OHM + RPOT_TOT_OHM +
1 / (1.0 / RES2_OHM + 1.0 / (m_temperatureOhm + RTEMP_ADJUSTMENT));
#if (false)
LOG_STDOUT(
m_xPos << ": batt=" << m_batteryVoltage <<
", rTot=" << rTot << ", rPos=" << rPos
);
#endif
m_vPos = m_batteryVoltage * rPos / rTot;
m_vRef = m_batteryVoltage * RPOT_TOT_OHM / rTot;
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::AdjustRefVolt()
{
double adjustScale = m_vRef / VREF_18C_127V;
m_vRef = m_vRef + m_adjustmentVoltRef * adjustScale;
// LOG_STDOUT( "adjustScale=" << adjustScale );
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::AdjustPosVolt()
{
double adjustScale = m_vRef / VREF_18C_127V;
double lowEndScale = ( 110.0 - m_xPos ) / 110.0;
double highEndScale = ( 110.0 - ( 110.0 - m_xPos )) / 110.0;
m_vPos =
m_vPos +
m_adjustmentVoltLow * lowEndScale * adjustScale +
m_adjustmentVoltHigh * highEndScale * adjustScale;
if ( m_vPos > m_vRef ){ m_vPos = m_vRef; }
#if ( false )
LOG_STDOUT(
"\nadjustScale =" << adjustScale <<
"\nlowEndScale =" << lowEndScale <<
"\nhighEndScale =" << highEndScale <<
"\nadjustmentVoltLow =" << m_adjustmentVoltLow <<
"\nadjustmentVoltHigh=" << m_adjustmentVoltHigh
);
#endif
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::UpdateBatteryVoltage()
{
m_battSensorValue =
m_battValueSuppressor.SetValue(
analogRead( BATTERY_VOLTAGE_ANALOG_IN_PIN )
);
double adVolt = ( m_battSensorValue / 1023.0) * OPERATING_VOLTAGE;
m_batteryVoltage =
adVolt * ( BATT_VOLT_BOTTOM_RESISTANCE + BATT_VOLT_TOP_RESISTANCE )
/
BATT_VOLT_BOTTOM_RESISTANCE;
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::UpdateDisplay()
{
if ( true == m_displaySelectButton.IsClicked() ){
m_displayMode = Mode( uint8_t(m_displayMode) + 1 );
if ( DEBUG < m_displayMode ){ m_displayMode = BASIC; }
m_lcd.ClearDisplay();
}
switch( m_displayMode ){
case BASIC : ShowBasicDisplay(); break;
case ADJUST : ShowAdjustmentDisplay(); break;
case CALIBRATE : ShowCalibrationDisplay(); break;
case DEBUG : ShowDebugDisplay(); break;
}
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::ShowBasicDisplay()
{
m_lcd.SetPosition( 0, 0 );
m_lcd.print( m_xPos, 1 );
m_lcd.print( " " );
m_lcd.SetPosition( 0, 6 );
m_lcd.print( m_batteryVoltage, 1 );
m_lcd.print( "V " );
m_lcd.SetPosition( 0, 12 );
m_lcd.print( (int)m_temperatureCelcius );
m_lcd.print( "C " );
m_lcd.SetPosition( 1, 0 );
m_lcd.print( "r:" );
m_lcd.print( m_vRef, 2 );
m_lcd.print( "V " );
m_lcd.SetPosition( 1, 8 );
m_lcd.print( "p:" );
m_lcd.print( m_vPos, 2 );
m_lcd.print( "V " );
return;
}
/*--------------------------------------------------------------------*//**
* In 10mV, i.e. 1V -> 100
*//*--------------------------------------------------------------------*/
void CxMafSensor::ShowAdjustmentDisplay()
{
m_lcd.SetPosition( 0, 0 );
m_lcd.print( "Low High Ref " );
m_lcd.SetPosition( 1, 0 );
m_lcd.print( int(m_adjustmentVoltLow * 100.0) );
m_lcd.print( " " );
m_lcd.SetPosition( 1, 5 );
m_lcd.print( int(m_adjustmentVoltHigh * 100.0) );
m_lcd.print( " " );
m_lcd.SetPosition( 1, 11 );
m_lcd.print( int(m_adjustmentVoltRef * 100.0) );
m_lcd.print( " " );
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::ShowCalibrationDisplay()
{
m_lcd.SetPosition( 0, 0 );
m_lcd.print( "minPos maxPos" );
m_lcd.SetPosition( 1, 0 );
if ( WAITING_MIN_VALUE == m_calibrationState ){
m_lcd.print( "?" );
m_lcd.print( m_posSensorValue );
}
else{
m_lcd.print( m_minPosAdValue );
}
m_lcd.print( " " );
m_lcd.SetPosition( 1, 8 );
if ( WAITING_MAX_VALUE == m_calibrationState ){
m_lcd.print( "?" );
m_lcd.print( m_posSensorValue );
}
else{
m_lcd.print( m_maxPosAdValue );
}
m_lcd.print( " " );
return;
}
/*--------------------------------------------------------------------*//**
*
*//*--------------------------------------------------------------------*/
void CxMafSensor::ShowDebugDisplay()
{
m_lcd.SetPosition( 0, 0 );
m_lcd.print( m_posSensorValue );
m_lcd.print( " " );
m_lcd.SetPosition( 0, 5 );
m_lcd.print( m_temperatureOhm );
m_lcd.print( "ohm " );
m_lcd.SetPosition( 0, 12 );
m_lcd.print( m_battSensorValue );
m_lcd.print( " " );
return;
}
} // end of namespace
//*** end of file ***
K-a-r-i
| Liitteet: |
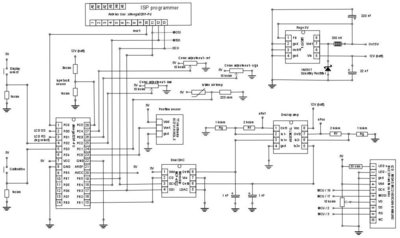
MAF_electric.jpg [ 83.13 KiB | Katsottu 5597 kertaa ]
|
|